- Jan 2025: I-CTRL has been accepted to RAM Journal!
- Sep 2024: Self-AWare has been accepted to Humanoids 2024 and HFR 2024.
- Jun 2024: I-CTRL is out! Take a look to control any bipedal humanoid robots by imitating any human motion.
- Feb 2024: I have been a visiting researcher in PAL Robotics and IRI-UPC
- Dec 2023: ECHO has been accepted to ICRA 2024.
- Dec 2023: UNIMASK-M has been accepted to AAAI 2024.
- Sep 2023: ImitationNet has been accepted to Humanoids 2023.
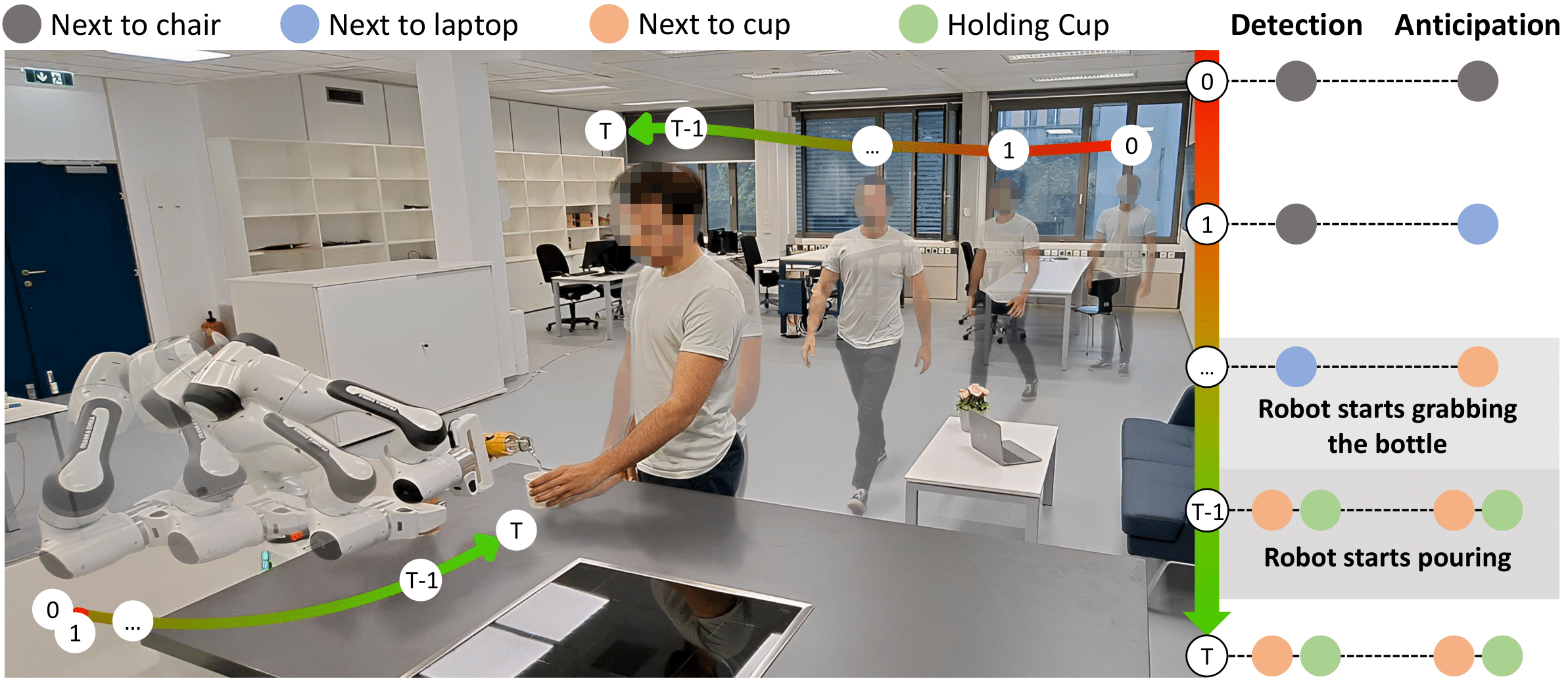
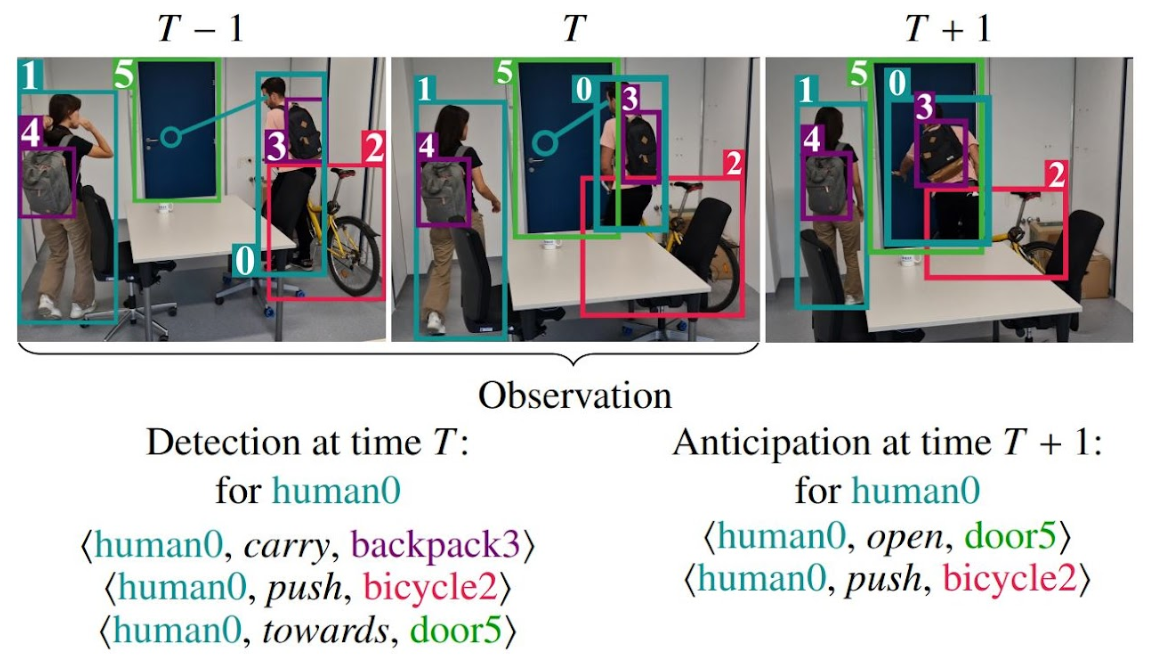
- Sep 2023: HOI4ABOT has been accepted to CoRL 2023.
- June 2023: HOI-Gaze has been accepted to CVIU Journal 2023.
- Apr 2023: I have been a visiting researcher in the AImageLab in UNIMORE, under the supervision of Prof Simone Calderara and Prof Lorenzo Baraldi.
- Jan 2023: DiffusionMotion has been accepted to ICRA 2023.
- Nov 2022: I-CVAE has been accepted to WACV 2023.
- Oct 2022: We won the ECCV@2022 Ego4D Long-Term Action Anticipation Challenge: First Place Award with I-CVAE.
- Jun 2022: We won the CVPR@2022 Ego4D Long-Term Action Anticipation Challenge: First Place Award with I-CVAE.
- Jun 2022: Our team moved from TUM to TUWien. Happy for a new start in the new Autonomous Systems Lab.
- Apr 2022: 2CHTR has been accepted to IROS 2022.

Hello, I'm Esteve Valls Mascaro
I am a PhD at TuWien advised by Prof Dongheui Lee , where I work on understanding human intention for a better human-robot collaboration.